I'm a robotics researcher passionate about combining classical and learning-based algorithms to enable robust, real-world robotic decision-making. Most recently, I worked at an agtech startup building an autonomous strawberry picking robot using imitation learning. I got my Ph.D. from MIT CSAIL, where I developed algorithms for efficient robot navigation under uncertainty.
Selected Projects
Autonomous Strawberry Picking
The complex and dynamic nature of agricultural environments presents significant challenges for robotics and ML deployments. I led efforts to test behavior cloning techniques for autonomous strawberry picking in a proxy lab setting, and I developed data analysis and curation tooling to track and improve on-farm picking performance.
Vision-Based Furrow Navigation
Accurate in-furrow centering is vital for reliable autonomous fruit harvesting. I developed an imitation learning model for vision-based trajectory prediction, enabling over 2 km of autonomous in-furrow navigation over 5+ months of deployment.
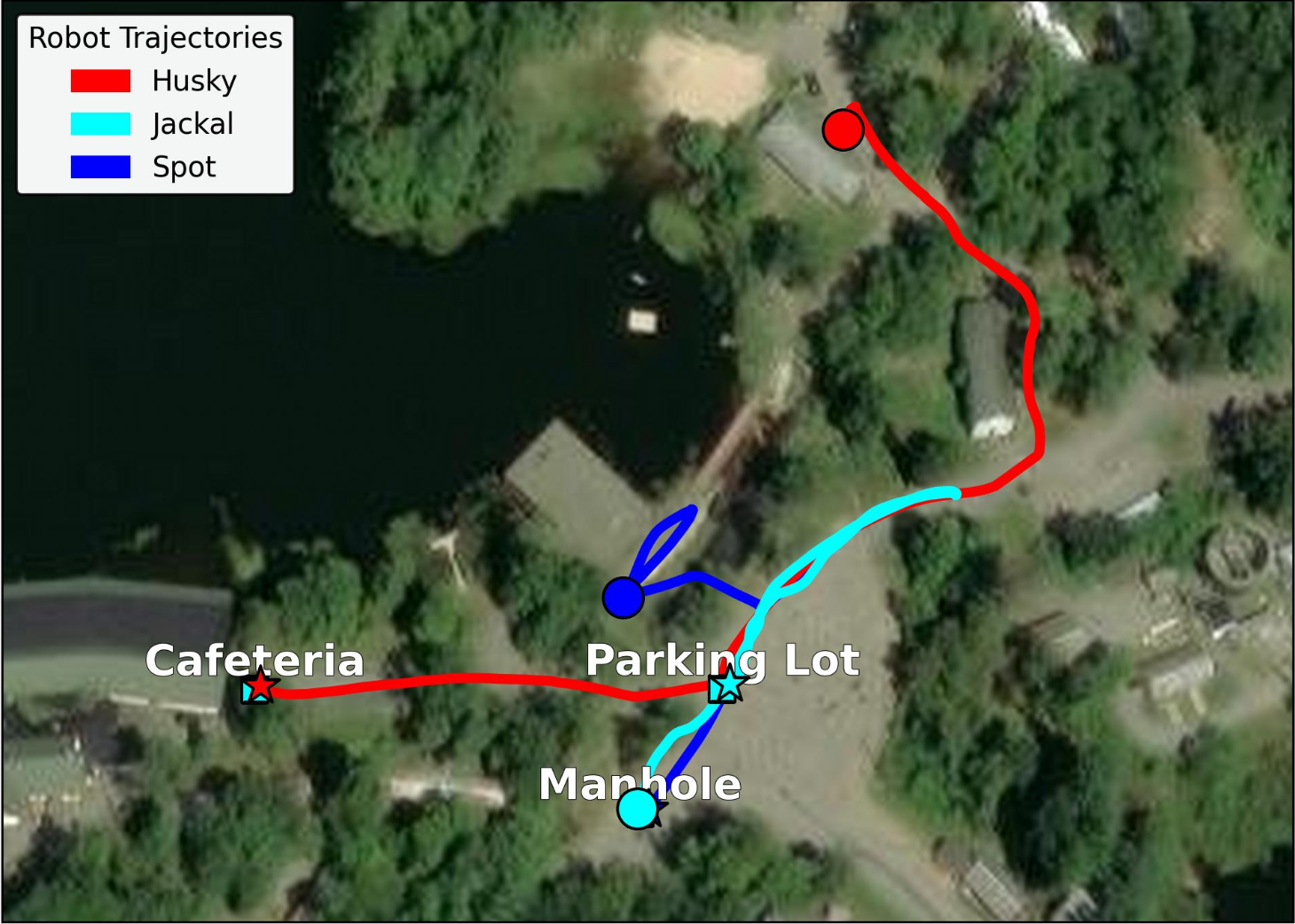
Multiagent Navigation Under Uncertainty
I proposed a graph-based planner that enabled a team of robots to coordinate collaborative sensing actions in partially known environments, then integrated and deployed the technique over 22 long length-scale (~50m) experiments for heterogeneous teams of up to 3 robots.
Publications
Conference Papers
*equal contribution
Y. Veys*, H. Biggie*, M. S. Kurtz*, S. Prentice*, J. Arkin, T. Manderson, A. Saravanan, C. Nieto-Granda, L. Quang, E. Stump, C. Fan, L. Carlone, J. How, N. Roy. "Hierarchical Uncertainty-Aware Multi-agent Collaborative Planning System." International Symposium on Experimental Robotics (ISER), 2025.
Y. Veys, M. S. Kurtz, N. Roy, "Generating Sparse Probabilistic Graphs for Efficient Planning in Uncertain Environments." International Conference on Robotics and Automation (ICRA), 2024.
M. Stadler, J. Banfi, N. Roy, "Approximating the Value of Collaborative Team Actions for Efficient Multiagent Navigation in Uncertain Graphs." International Conference on Planning and Scheduling (ICAPS), 2023.
A. Messing*, J. Banfi*, M. Stadler, E. Stump, H. Ravichandar, N. Roy, S. Hutchinson, "A Sampling-Based Approach for Heterogeneous Coalition Scheduling with Temporal Uncertainty", Robotics: Science and Systems (RSS), 2023.
M. Stadler, K. Liu, N. Roy. "Online High-Level Model Estimation for Efficient Hierarchical Robot Navigation." IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
K. Liu*, M. Stadler*, and N. Roy. "Learned Sampling Distributions for Efficient Planning in Hybrid Geometric and Object-Level Representations." International Conference on Robotics and Automation (ICRA), 2020.
Workshop Papers
M. S. Kurtz*, S. Prentice*, Y. Veys, L. Quang, C. Nieto-Granda, M. Novitzky, E. Stump, N. Roy, "Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System." ICRA Workshop on Field Robotics, 2024.
Theses
M. S. Kurtz, "Towards Efficient Planning for Navigation using Global Information in Large and Uncertain Environments." Ph.D. thesis, 2024.
M. Stadler, "Learned Functions for Perceptually Informed Robot Navigation." Master's thesis, 2020.